Swarm tutorial
Swarmの利用法を学ぶためのチュートリアルが用意されている。しかしこのチュートリアルはObjective-Cで書かれているため、Javaに翻訳したものをここに掲載する。順番に見ていけばSwarmの利用法がわかるだろう。
- simpleCBug
- simpleObjCBug
- simpleObjCBug2
- simpleSwarmBug
- simpleSwarmBug2
- simpleSwarmBug3
- simpleObserverBug
- simpleObserverBug2
- simpleExperBug
simpleCBug
1匹のbugが歩き回る。
クラス図・Javadoc

main methodを持つクラスがあるだけである。
実行方法
$ gcjswarm simpleCBug.java でビルド $ ./simpleCBug で実行
gcjswarmについてはインストール方法を参照。
simpleObjCBug
1匹のbug(オブジェクト)が歩き回る。
クラス図・Javadoc
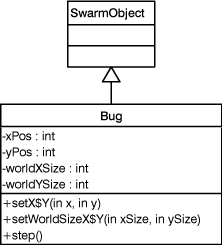
simpleObjCBugがオブジェクトBugを生成する。BugはSwarmの基本的なオブジェクト(SwarmObjectImpl)である。Bugの各メソッドは自分自身(this)を返すが、この記述は以後省略する。
simpleObjCBug2
1匹のbug(オブジェクト)が歩き回る。
餌がfoodSpace(オブジェクト)にある。
クラス図・Javadoc
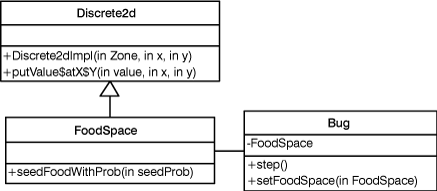
Bugは餌がまかれた空間FoodSpaceの中を歩き回る。FoodSpaceはSwarmライブラリが提供する格子Discrete2dImplである。
simpleSwarmBug
modelSwarm(オブジェクト)がfoodSpaceとbugを作る。
1匹のbugが歩き回る。
BugとFoodSpaceはsimpleObjCBug2と同様である。
クラス図・Javadoc

処理の流れ
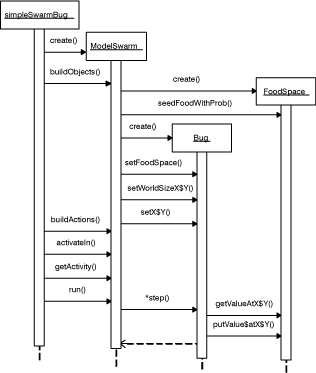
- simpleSwarmBugがModelSwarmを作る(ModelSwarmはSwarmImplである)
- ModelSwarmのbuildObjectsがBugとFoodSpaceを作る
- ModelSwarmのbuildActionsがスケジュール(Bugが時間間隔1でstepする)を作る
- ModelSwarmのactivateInがスケジュールを確定する
- simpleSwarmBugがトップレベル(ModelSwarm)のactivityをgetActivityで取得し、実行する(run)
シーケンス図
厳密にはrun()はModelSwarmのメソッドではない。
simpleSwarmBug2
modelSwarmがfoodSpaceとbugs、world(オブジェクト)を作る。
複数匹のbugsがworldの中を歩き回る。
クラス図・Javadoc
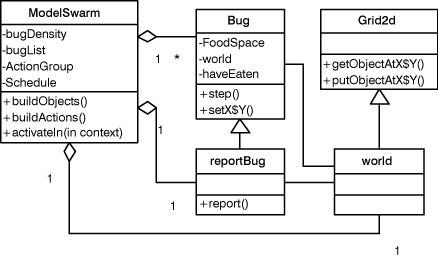
コレクション・ライブラリ(List)を用いて、複数のBugを扱えるようにする。ただし、そのうちの1匹はreportBugとし、餌を見つけた場合にそのことを報告するようにする(図ではBugの継承のように描いているが実装はそうではない)。
BugたちはGrid2dImplを継承したworldの中に自分への参照を置き、ランダム・ウォークの際には、他のBugがいないことを確認してから移動する。
simpleSwarmBug3
ファイルbug.scmからパラメータを読み取り、modelSwarmを作る。
modelSwarmがfoodSpaceとbugsとworldを作る。
複数匹のbugsがworldの中を歩き回る。
simpleSwarmBug3のメソッドmainで次のように書けば、ModelSwarmのインスタンスが生成される。
modelSwarm = (ModelSwarm)Globals.env.lispAppArchiver.getWithZone$key(Globals.env.globalZone,"modelSwarm");
パラメータ・ファイル:bug.scm
パラメータ・ファイルの内容は次のようなLispのS式である。
(list
(cons 'modelSwarm
(make-instance 'ModelSwarm
#:worldXSize 80
#:worldYSize 80
#:seedProb 0.9
#:bugDensity 0.01)))
lispAppArchiverで設定できるフィールドは、publicなものに限られることに注意。よって、ModelSwarmは修正が必要である。他に必要な修正は、simpleSwarmBug3に、lispArchiverの呼び出しを加えることだけである。
Javadoc
simpleObserverBug
observerSwarm(オブジェクト)がbug.scmからパラメータを読み取り、worldRaster(worldとfoodSpaceを表示するためのオブジェクト)とmodelSwarmを作る。
modelSwarmがfoodSpaceとbugsとworldを作る。
複数匹のbugsがworldの中を歩き回る。
クラス図・Javadoc
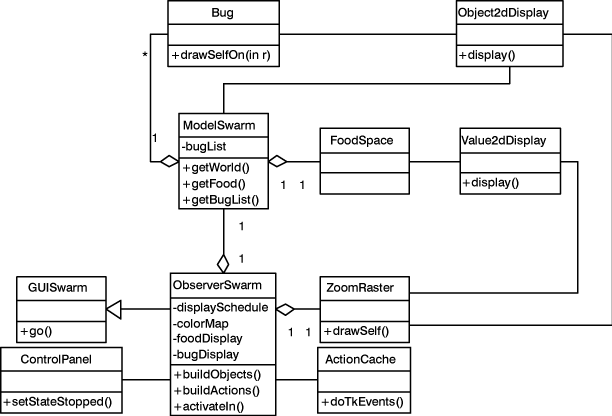
GUIとして、ControlPanelとZoomRasterが加わる。ControlPanelはシミュレーションの開始や停止のためのボタンを提供し、ZoomRasterはFoodSpaceおよびBugたちの様子を視覚化する。
FoodSpaceを画面に表示するためには、ZoomRasterとFoodSpaceの間にValue2dDisplayを介在させればよい。同様に、bugListの表示のためには、Object2dDisplayを用いる。
simpleObserverBug2
obserSwarmがbug.scmからパラメータを読み取り、worldRasterとmodelSwarm、メンバのためのprobeMap(オブジェクト)を作る。
modelSwarmはfoodSpaceとbugs、world、probeMapを作る。
複数匹のbugsがworldの中を歩き回る。
クラス図・Javadoc
Probe
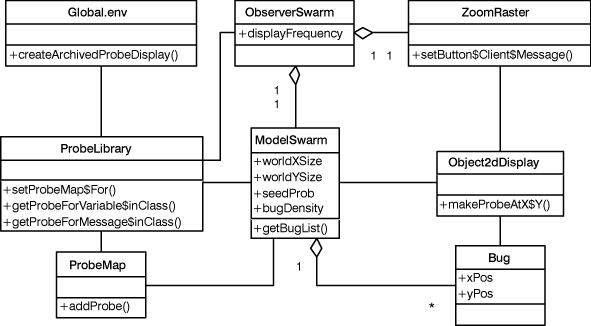
Probeによって、ユーザーはリアルタイムにシミュレーターを操作することができる。ここでは、ModelSwarmとObserverSwarmのためのProbeを生成している。よって、起動時に現れるProbeは次の2つである。
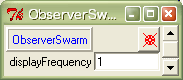
ObserverSwarmのProbeはデフォルトのProbeで、publicなフィールド(displayFrequencyのみ)を表示している。デフォルトのProbeのため、Globals.env.createArchivedProbeDisplayだけで作成することができる。
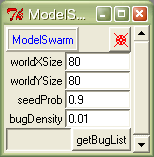
ModelSwarmのProbeはカスタマイズしてあり、publicなメソッドgetBuglistも呼び出せるようになっている(クリックで呼び出せるが、この場合参照が返るだけである)。
カスタマイズするには、ProbeMapに欲しい要素を登録し(addProbe)、そのProbeMapをProbeLibraryに登録すればよい(setProbeMap$For)。この例では次の手順でModelSwarmのためのProbeを作成している。
- ProbeMapにフィールドであるworldXSize, worldYSize, seedProb, bugDensityとメソッドであるgetBuglistを登録
- このProbeMapがModelSwarmのProbeであることをProbeLibraryに登録
- Globals.env.createArchivedProbeDisplay (modelSwarm, "modelSwarm");
フィールドの値を変えるためには、新しい数値を入力して、Enterキーを押す。たとえば、worldXSizeを200worldYSizeを20にしてからStartボタンを押すと、シミュレーションは次のようになる。

FoodSpace上のBugをクリックすることで、次のようにそのBugのProbeを生成できる(これまでxPos,yPosはprivateだったが、ここではProbeで操作できるようにpublicにしている)。
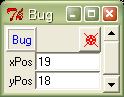
これは、ZoomRasterのsetButton$Client$Messageによって、右クリックするとObject2dDisplayのmakeProbeAtX$Yが呼ばれるように設定されているからである。
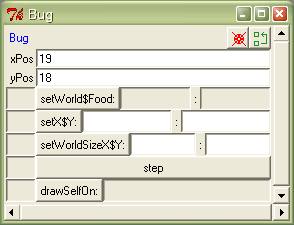
Probeにある青字のクラス名を右クリックすると、publicなフィールドとメソッドをすべて表示させることができる。たとえば、Bugを右クリックすると、次のようになる。
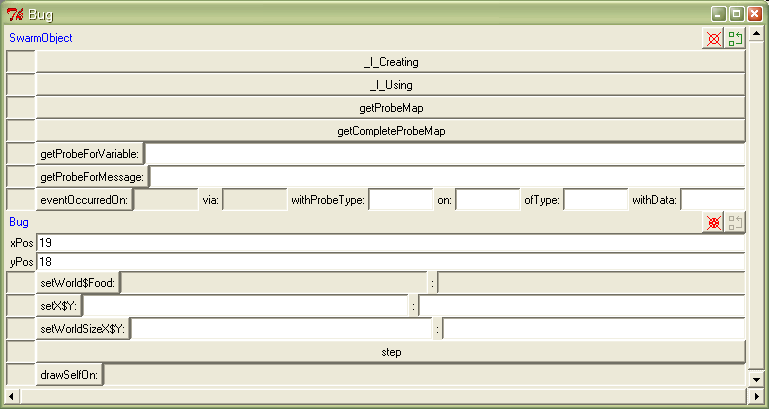
さらに、右上にある をクリックすると、スーパークラスのProbeが生成される。
をクリックすると、スーパークラスのProbeが生成される。
simpleExperBug
オブジェクトexperSwarmが、bug.comからparameterManager(オブジェクト)、resultGraph(グラフ表示のためのオブジェクト)、複数のmodelSwarms、modelSwarmのためのprobeMapを作る。
modelSwarmはfoodSpaceとbugs、worldを作る。
複数匹のbugsがworldの中を歩き回る。
クラス図・Javadoc
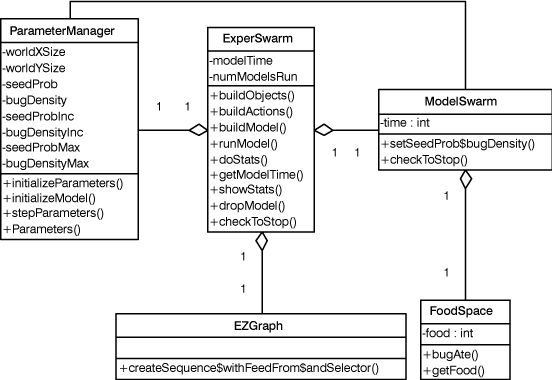
ここではランダム・ウォークするBugたちによってFoodSpaceが食べ尽くされるまでの時間を調べている。Bugは餌を見つけるとFoodSpaceのメソッドbugAteを呼ぶ。bugAteが餌の数foodをデクリメントすることによって、餌の数を把握することができる。
ModelSwarmはFoodSpaceの餌の数を調べ、0になったらシミュレーションを終了する。
ExperSwarmはModelSwarmを監視し、シミュレーションが終わったら、新しいモデルを生成する。モデルのパラメータはParameterManagerによって設定する。
餌が食べ尽くされるまでの時間はモデルのパラメータによって変わるが、その変化の様子をグラフで視覚化する。
(プログラムのシーケンスは、ExperSwarmとModelSwarmのスケジュール(ActionGroupが一つ登録されている)をみればわかる。)